"Rover" kelimesi aslında Türkçe'de "gezgin" olarak tanımlanmakta. Ancak Türkçe'de de popüler Mars kültürü etkisiyle en çok kullanılan ve benimsenen ifade "Rover" olduğu için makalede bu şekilde devam etmek anlaşılırlık açısından daha iyi olacak kanaatindeyim.
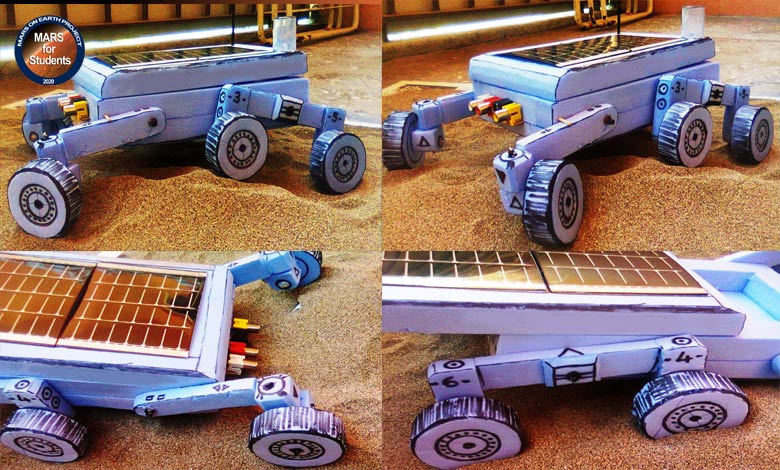
Bu yazıda; proje kapsamında ele aldığımız rover prototipini sizlerle paylaşacağız. Rover derken, tabi ki gerçek bir Mars rover veya yarışmalarındaki araçlar seviyesinde bir prototip değil. Bu, tamamen kendi görev misyonunda ve kendine has özellikler içeren bir model. Tasarımın basitliği bilgi eksikliğinden değil, başka insanların da kolayca üretebilmelerine olanak sağlamak içindir. Özetle "ben yaptım oldu" değil, "biz yaptık, siz de yapabilirsiniz" mantığı projeye hakimdir. İlerleyen zamanlarda prototipin neler yapabileceğini hep birlikte göreceğiz.
İlk adımlardan bu yana...
Bir söz vardır, severim. "İnsanlar hayalleri için yaşamalı." Yukarıdaki fotoğraf, yoğun iş dönemlerinden arta kalan zamanlarda bugün yapmak istediğimiz şeyin kağıt üzerinden poliüretan köpük ile şekil bulmuş haline ait. O zamanlar hızlı taslak modelleme için en kolay işlenebilen malzemeydi, İşin özü "Yap, incele, olmadı mı, yenisini beş dakikada yine yap" idi.
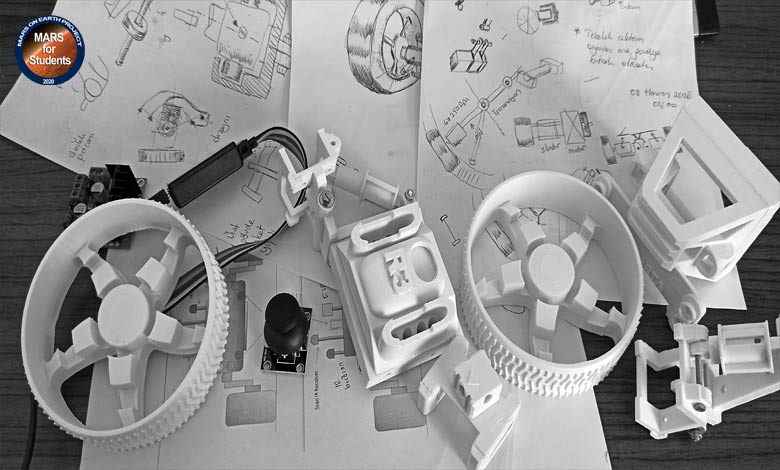
Bugün tam 8 yıl olmuş. Zaman bir çok şeyi değiştirmiş ancak hayal ve hayalleri gerçekleştirmek adına inadımızı törpüleyememiş. Artık daha geniş kapsamlısını kolayca 3D printer teknolojisi ile basabiliyoruz. Yine de önce kağıt ortamında taslak çizimlerle uğraşmak ve kağıt kokusunu hissetmek güzel. Neyse, nostaljiyi bir kenara bırakıp konumuza devam edelim biz.
Bu makalede genel hatları ile rover prototipinin özelliklerini inceleyeceğiz. Devam yazılarda zaten detaylıca yapım aşamaları anlatılacak.
Rover Ebatları
| Uzunluk | 420 mm. |
| Genişlik | 260 mm. |
| Yükseklik | 120 mm. |
| Ağırlık | 1100 Gr.(Pil bloğu dahil) |
Rover Faydalı Yük (Payload) Özellikleri
| Konum Belirleme | Mars gezegeni üzerinde Dünyada olduğu gibi küresel konum belirleyici GPS - GLANOS vb. uydular bulunmadığı için konumlama roverlerin akıllı teker encoder sistemleri ve yapay zeka yazılımları ile yapılmaktadır. Bu nedenle roverde GPS modülü vs. kullanılmamış, bunun yerine pasif konum belirleme sistemi ve buna uygun ağ yapısı planlanmıştır. |
| IR Beacon | Gövdenin her iki yanında birer adet Infrared işaretçi LED (Infrared IR LED Beacon) bulunmaktadır. Bu işaretçilerin görevi; uygulamada herhangi bir GPS bulunmadığı için pasif konum belirleme ağının bir parçası olarak görev yapmaktır. |
| 3 Eksen Ölçüm | MPU-6500 sensörü gerçek roverde denge durumunu belirleyen Ataletsel Ölçüm Birimi (Inertial Measurement Unit-IMU) benzetimidir. MPU-6500 serisi benzeri olan diğer sensörlere göre (MPU-6000 ya da 6050) hem I2C hem de SPI’yı desteklemektedir. 32kHz Gyro güncelleme hızına ve daha geniş Gyro sinyal bant genişliğine sahiptir. Daha az enerji tüketir, titreşime daha duyarlıdır ki proje için yeterlidir. |
| Güneş Yön Sensörü | Arka gövde üzerinde kendi taşıyıcısı içerine 45 derecelik açı ile dört farklı yöne bakacak şekilde yerleştirilmiş 5 mm lik LDR sistemidir. Üzerine düşen gün ışığı değerine göre güneşin prototipe göre yönünü (X-Y düzlemde) rover sürücüsüne telemetre olarak arayüze iletir, çalışma sistemi uydularda kullanılan "Nadir Sensör" benzetimidir. |
| Kamera Sistemi | ESP32CAM (AI) Resim çekiminde kullanılacak olup, detayı aşağıda belirtilmiştir. |
| Yüzey Sensörü | Rover alt gövde yapısına monteli proje için geliştirilen mini dedektör ve veri sağlayıcı sistem. (MK38 Modülü) |
| Atmosferik Sıcaklık | Atmosferik dış ortam sıcaklık değeri ölçüm. (MTO Modülü) |
| Atmosferik Nem | Atmosferik nem değeri ölçüm. (MTO Modülü) |
| Rakım | Rakım ölçümü.(MTO Modülü) |
| Basınç | Basınç değeri ölçümü.(MTO Modülü) |
| Araç İçi Sıcaklık | Araç gövde içi sıcaklık değeri ölçüm. |
| Motor Sıcaklık | Motor sıcaklık değeri ölçüm. |
| Batarya Sıcaklık | Batarya sıcaklık değeri ölçüm. |
| Aydınlatma Ön | Gece kullanım için Beyaz-Sarı renk ve IR aydınlatma (Test amaçlı). |
| Aydınlatma Arka | Diğer roverler için ışıklı bilgilendirme, kimlik bildirimi ve göreceli konum tespit amaçlı 2 renk aydınlatma. |
| Yazılım | Internet ağ yapısına bağlı rover kontrol yazılımı, sunucu yapılanması, veritabanı ve sürücü/komuta kontrol web arayüzleri. |
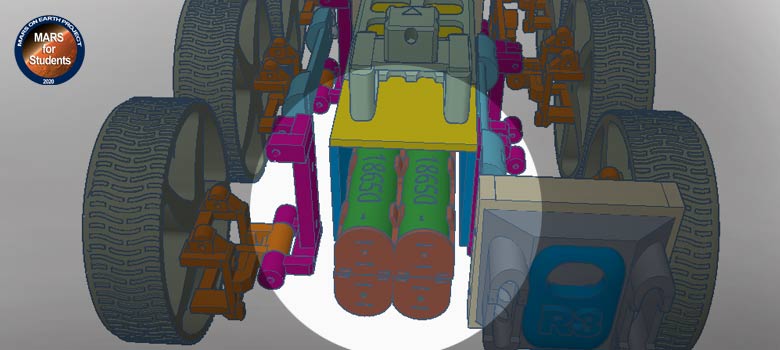
Rover Gövde Yapısı
Tasarım yapıda oluşturulmuştur. Araçta yekpare gövde yoktur. Toplamda 3 ana taşıyıcı omurga iskelet tutucu; çift taraflı süspansiyon kolu, salıncak, süspansiyon amortisörü, motor ve tekerleği sabitlemektedir. Parçalar standart metrik (M3) civata ile kolayca birbirine montajlanabilmektedir. Modülerlik yapısı ile;
- Tasarımın modüler yapılması ile ana gövde istenildiği taktirde uzatılıp-kısaltılabilir,
- Süspansiyon donanımı ile birlikte orta teker çifti ve taşıyıcı omurga parçası tamamen ayrılıp 4x4 (4W) konumunda kullanılabilir,
- Ön kısma farklı ebatlarda tekerlek takılabilir
- Hareket sistemi sadece ön düzen değiştirilerek diferansiyel sürüşten normal direksiyon mafsalı ile sağa-sola dönüş şeklinde değiştirilebilir.
Motorlar
Model rover üzerinde toplamda 6 adet 6V 250 RPM'lik motor kullanılmaktadır. Teker motor başına yaklaşık 200 gramlık pay öngörüldüğü için yeterlidir. Motor tipleri herkesin yapabilmesi amaçlandığından ekonomik ve plastik redüktörlü klasik motorlar baz alınmıştır.

Bu motor setinde; motorun her iki tarafında da mil çıkışı olduğu için sağ tarafa, sol tarafa veya aynı anda iki tarafa da teker takılmasına uygundur. İstenildiğinde boşta kalan şaft ucuna encoder de takılması mümkündür.
Genel Motor Özellikleri
| Çalışma Voltajı | 3-6V |
| Redüksiyon Oranı | 1:48 |
| Hız | 250 RPM (6V ile) |
| Akım | 95mA (Maksimum 160mA) |
| Ağırlık | 29gr |
| Teker Çapı | 70mm |
| Teker Kalınlığı | 30mm. |
| Teker Kalınlığı | 28gr. |
Motor Sürücüleri
Bu tip motorlar özellikle zorlandıklarında çektikleri güç bakımından doğrudan bir gömülü sistemin beslemesine bağlanamayacaklarından, motor sürücü kullanılması bir zorunluluk olarak öne çıkmaktadır. Piyasada genelde çift motora bir motor sürücüsü şeklinde ürünler ön plandadır. Örnek prototip testlerinde L298N entegreli motor sürücüsü kullanılmıştır.
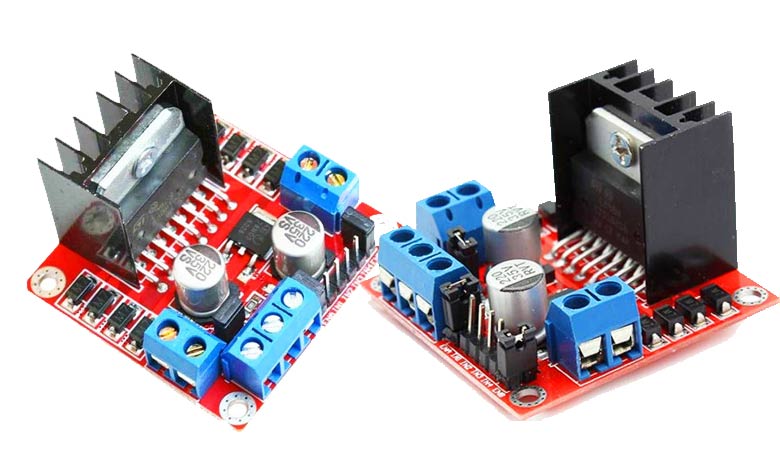
Yukarıda resmi görülen L298N motor sürücüsü; kanal başına 2A akım verebilmektedir ve birbirinden bağımsız iki ayrı motoru kontrol etme imkanına sahiptir. Kart üzerinde dahili regülatör, yüksek sıcaklık ve kısa devre koruması, motor dönüş yönüne göre yanan LED'ler ve entegreye başlı soğutucu platform bulunmakta, akım okuma (current sense) pinleri ile çekilen akım da ölçülebilmektedir.
L298N Motor Sürücüsünün Pin Bağlantıları
| ENA | Sol motor kanalını aktif etme pini |
| IN1 | Sol motor 1. girişi |
| IN2 | Sol motor 2. girişi |
| IN3 | Sağ motor 1. girişi |
| IN4 | Sağ motor 2. girişi |
| ENB | Sağ motor kanalını aktif etme pini |
| Motor A | Sol motor çıkışı |
| Motor B | Sağ motor çıkışı |
| VCC | Besleme voltaj girişi (4.8V-12V |
| GND | Toprak bağlantısı |
| 5V | 5V çıkışı |
Motorlar zorlandığı taktirde (tırmanma veya uzun süreli diferansiyel dönüşlerde) çekecekleri akım dolayısıyla ısı üreteceğinden dolayı, en çok yük taşıyacak ve zorlanacak olan arka sağ motorlarda sıcaklık değeri sürekli olarak kullanıcı ekranına telemetre edilmektedir. Isı limitlerinin aşımında rover kendisini korumaya alacak ve normal limitlere düşene dek hareket etmesi rover yazılımı tarafından engellenecektir. Bu durum yine kullanıcı ekranında önemli bir uyarı olarak görüntülenecektir.
Taşıyıcı Tekerlekler Yapısı
Hazır plastik tekerler, robotik uygulamaları ve uzaktan kontrollü (Remote Control-R/C) model araçlara yönelik üretildiklerinden dolayı görünüm olarak rover tekerlerinden farklıdır. Normal rover tekerleri ise, hareket halinde teker içine dolan ince Mars kumunun kolayca teker dışına boşaltılabilmesi için açık ve esnek ince jant-teker şeklinde tasarlanmıştır.
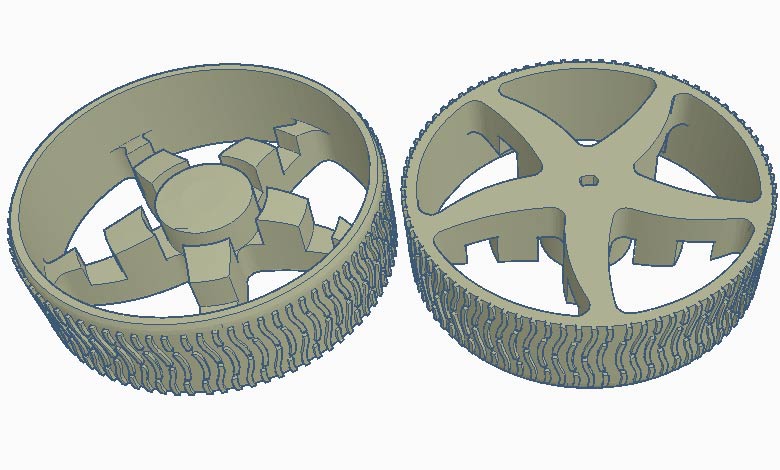
Satılan model kitlerde teker çapının büyütülmesi teker başına düşen maliyeti arttırmaktadır. Bu nedenle yüzeyden yükseklik kazanmak için genelde motorlarla birlikte verilen standart 70 mm.lik plastik tekerlekler yerine 100 mm. çapında yeni teker yapısı tasarlanmış ve 3D yazıcıdan "PLA" filament kullanılarak basılmıştır. Standart teker ve 3D yazıcıda üretilen tekerin ağırlığı arasındaki fark sadece (+/-) 10 Gr. dır.
Tekerin baskı süresi genel tip yazıcılarda yaklaşık olarak 6,5 saattir ve toplamda teker başına yaklaşık 14.8 metre 44 gram filament harcanmaktadır. Teker mili yuvası standart 6V 250 RPM plastik dişli çift şaftlı motorlar için uygun olup, yapıştırma desteği için de 1 mm'den az pay bırakılmıştır.
Teker jantı teker çeperiyle bütünleşik yapıda olup, 5 ayrı noktadan taşıyıcı şaft milini tekere sabitlenmektedir. İlk tasarımdaki 3 nokta bağlantılı jant kolları, PVC yerine baskı kullanıldığı için dayanımı arttırmak amacıyla 5 noktaya çıkarılmıştır.
Tekerlekler denemelerden elde edilecek veriler ışığında yeniden dizayn edilene kadar yüzeye tutunucu basit kabartma parçacıklı yapısı kullanılacak şekilde üretilmiştir. Teker yüzeyinin tutucu tırnakları yapı küçük olduğundan geniş parçalı tutuculara göre daha az sarsıntıya maruz kalması için bilerek küçük ve birbirine yakın yapılmıştır.
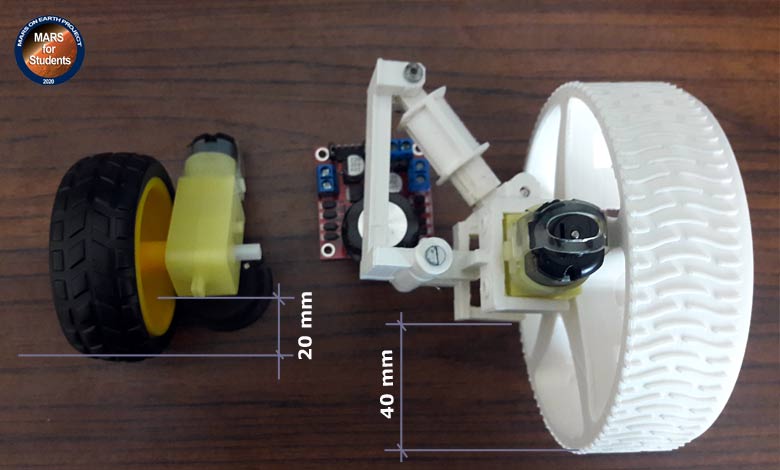
Standart teker yapısı yüzey ile motor alt kısmı arasında 20mm yükseklik sağlarken, tasarlanan 3D baskı modelde bu mesafe 40mm'ye yükseltilmiştir.Klasik DC motorların yerine çok sayıda tekerle güçlü bir çekiş gücü (tork) için yukarıda belirtilen redüktörlü motor tipleri seçilmiştir. Bu motorların aynı zamanda düşük devirli olması fiziksel modellenmiş Mars arazisinde rover'in kontrolünü ve teker tutunumunu da kolaylaştıracaktır.
Farklı versiyonda rover'in yine 6WD/AWD ve 100mm. olan teker çapları %10 ile %20 arasında azaltılarak arka 4 motor başına çift tekerli bir sistem de denenecektir. Bu teker başına harcanan enerjiyi bir miktar arttırsa da rover yavaş hareket edeceği ve teker başına tutunma yüzeyini arttıracağı için tolere edilebileceği öngörülmüştür. Arka tekerlerin çift, ön tekerlerin tek olması durumunda ön tekerlerin iç tarafta boşta kalan miline teker dönüş/kat edilen mesafe hesaplaması için encoder sistemi planlanmış olup, veri telemetreye dahil edilecektir.
Süspansiyon Sistemi
Mars gezegeni üzerinde bulunan rover sistemleri 1996'da gönderilen Sojourner isimli roverden bu yana genel olarak Rocker-Bogie süspansiyon sistemini kullanmaktadır. Mars Keşif Aracı Misyonu (Mars Exploration Rover Mission-MER) kapsamında Mars'a gönderilen; Spirit (Ruh) ile Opportunity (Fırsat), akabinde Curiosity (Merak) ve son olarak da Perseverance (Azim) de aynı yapıdadır.
Bu sistem araca engebeli arazide daha rahat hareket etme, yük dengeleme, aks gereksinimi olmaması gibi ek özellikler kazandırmaktadır. Sistem düşük hızlarda hareket eden roverler için iyi bir seçim olarak öne çıkmaktadır. Bu konuları ileriki zamanlarda Mars araçları ve özellikleri yazılarımızda daha detaylıca incelenecektir.
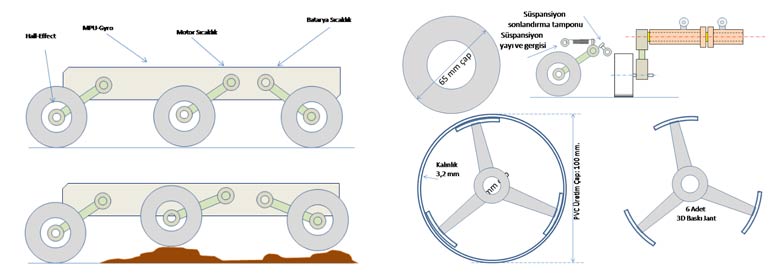
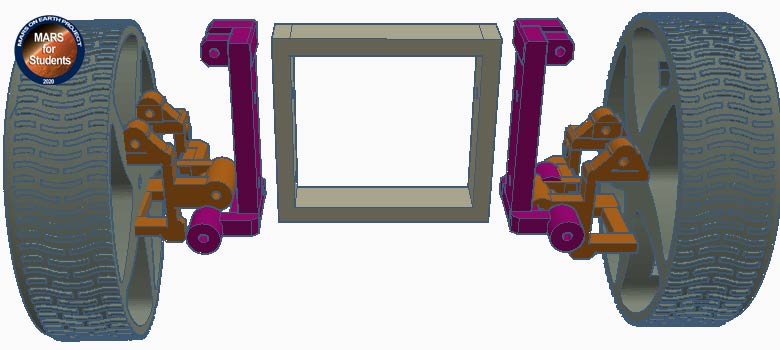
Süspansiyon sisteminde ilk başta yukarıdakine benzer yapı planlanmıştı. Bu yapı prototipin gövdesi dışında kalan ek aksamların (amortisörler, salıncaklar ve salıncak tablasının) ortadan kaldırılarak gövde içindeki yapı ile süspansiyon sağlama şekliydi. Ancak prototip çalışmada doluluk oranı ile baskı gecikmesine neden olmaması ve süspansiyon sistemine şu haline göre daha fazla yük binmemesi için bu tasarımdan vazgeçildi, yine de bu tasarım 4 tekerlekli farklı bir rover tasarımında tekrar kullanılacak.
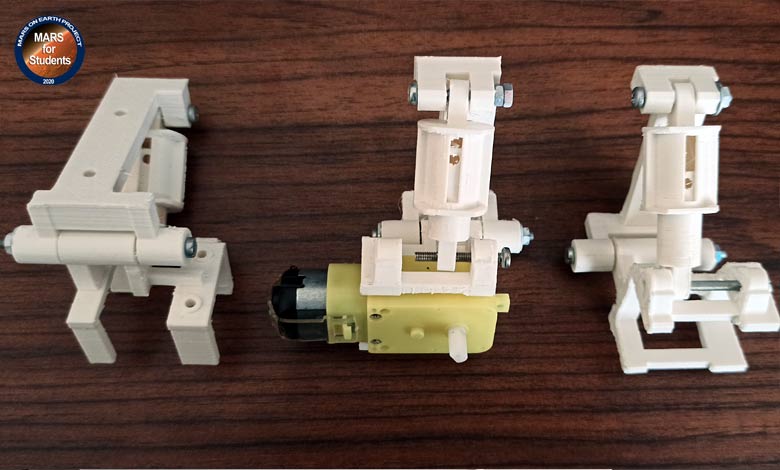
Süspansiyonun temelinde; 6 teker başına tekil bağımsız ve salıncak süspansiyon sistemi kullanılacak şekilde üretildi. Süspansiyon sistemi monte edildiği ana taşıyıcı kasa hariç;
- Salıncak tablası,
- Yaylı amortisör pistonları,
- Motor tutucudan oluşmaktadır.
Yukarıda belirtilen 3 parçalı donanım M3 civata ile monte edildikten sonra, kare yapısındaki ana taşıyıcıya yanlardan 2 adet M3 civata ile sabitlenmektedir. Parça birleşiminde civatanın dişli gövdesinin hareketli PLA parçalara (salıncak burçları) zarar vermemesi için somun takılan kısımları hariç diş yapısı törpülenmiş, iki tarafa da uygun pullar yerleştirilmiştir. (İstenirse somunlar güçlü yapıştırıcılarla sabitlenebilir veya ard arda çift somun kullanılarak yerinden oynaması engellenebilir.)
Amortisörler 2 parçalı olup, içine yay yerleştirilebilecek ve bu yayın da hareket limitlerinde sabitlenmesini sağlayacak pimli bir piston yapısına sahiptir. Kolay bir şekilde sadece yay kısmının değiştirilmesi ile de toplam ağırlığa göre gerekli olan süspansiyon limitleri ayarlanabilmektedir.
İlk versiyon prototipte kare şeklindeki tutucu traverse bağlı salıncak tablaları (sadece alt) tekil olarak tasarlandığı için tekerlek dikey ekseni için ilk askı bağlantısını merkez alacaktır. Bu da uzun zaman kullanımda tekerin görece yere basan iç yüzey kısmının dış yüzeye göre daha hızlı aşınmasına neden olacaktır ki bu öngörülen bir konudur. Diğer yandan prototip sert zeminde kullanılmayacağından aşınma zamanı test çalışmalarından çok daha uzundur.
Model Rover Kamera Sistemi
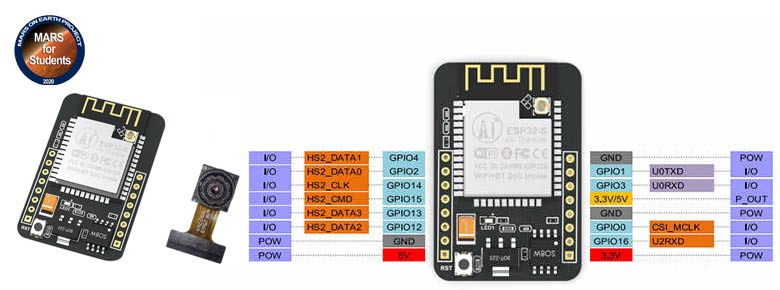
Roverin planlanmasında uzak mesafeye görüntü aktarımı yapılmayacağı için 5.8 GHz. video kamera/verici vb. tümleşik sistemler kullanılmamıştır. Bunun yerine kamera ve video vericisi için ayrı donanımlar yerine ekonomik bir şekilde tek donanımda birleştiren 2.4 GHz. kullanan ESP32-CAM modülü seçilmiştir.ESP32-CAM WI-FI ve Bluetooth birleşik yapıdadır ve TSMC ultra düşük güç 40nm teknolojisi ile tasarlanmıştır. Bu modül çok çeşitli uygulamalar ve farklı güç profilleri için en iyi performans, RF performansı, sağlamlık, çok yönlülük, özellikler ve güvenilirlik için tasarlanmış ve optimize edilmiştir.
Modül; mobil, giyilebilir elektronik cihazlar ve Nesnelerin İnternet'i (IoT) uygulamaları için de kullanılabilir. Son derece düşük güçte çalışan çip, ince ayarlı saat geçişi, güç modları ve dinamik güç ölçekleme gibi birçok özelliğe sahiptir.
ESP32-CAM, 10'dan az harici bileşenle sektördeki WI-FI + Bluetooth uygulamaları için entegre çözümdür. Anten anahtarını, RF balununu, güç amplifikatörünü, düşük gürültü alma amplifikatörünü, filtreleri ve güç yönetimi modüllerini birleştirir. ESP32-CAM Modülü OV2640 kamera modülü ile birlikte gelmektedir. Üzerinde 1 adet MicroSD hafıza soketi ile hafıza artırma imkanı da bulunmaktadır.
Modül sahip olduğu Bluetooth ve WI-FI iletişim haberleşme olanakları sayesinde kameradan alınan görüntüleri kablosuz olarak aktarabilme kabiliyetine sahiptir. Haberleşme mesafesini artırabilecek güçlü bir anten ile beraber gelmektedir. Çeşitli uzaktan görüntü alınabilecek uygulamalarda kullanım için çok uygun bir üründür.
Kamera Sistemi Genel Özellikleri
- Uygulama işlemcileri için düşük güçlü çift çekirdekli 32 bit CPU
- 240 MHz'e kadar ana frekans, işlem gücü 600 dMips'ye kadar
- Dahili 520 kB SRAM, harici 4 M PSRAM
- UART/SPI/I2C/PWM/ADC/DAC gibi arabirim desteği
- Destek OV2640 ve OV7670 kameralar, dahili flaş
- Destek görüntü WI-FI yükleme
- Destek TF kartı
- Birden fazla uyku modu desteği
- Gömülü Lwip ve ücretsiz RTOS
- Destek STA/AP/STA + AP çalışma modu
- Akıllı yapılandırma/AirKiss tek tıklama dağıtım ağı desteği
- Ikincil gelişme desteği
- Voltaj: 5V
- Akım: 2A
Tümleşik yapısı ve belirtilen özelliklerinin yanında yüz tanıma yapay zeka (Artificial Intelligence-AI) yazılımı içermesi nedeniyle model rover projesinde tercih sebebi olmuştur.
Çalışma sistemi içerisinde kullanıcı talepli resim çekim, normal zamanlarda belirlenen zamanlarda sürekli resim gönderme şeklinde çalışacaktır. Bu Mars gezegeninde gerçek roverin resim gönderme ve görüntü analiz çalışma mantığını öğretmek içindir.
Roverin normal zamanlarda çektiği resimler yazılım aracılığı ile ağa sunucusuna gönderilecek ve depolanacaktır. Kullanıcı arayüzünden bu resimleri diğer telemetre verileri ile birlikte gözlemleyebilecektir.Güç Bütçesi
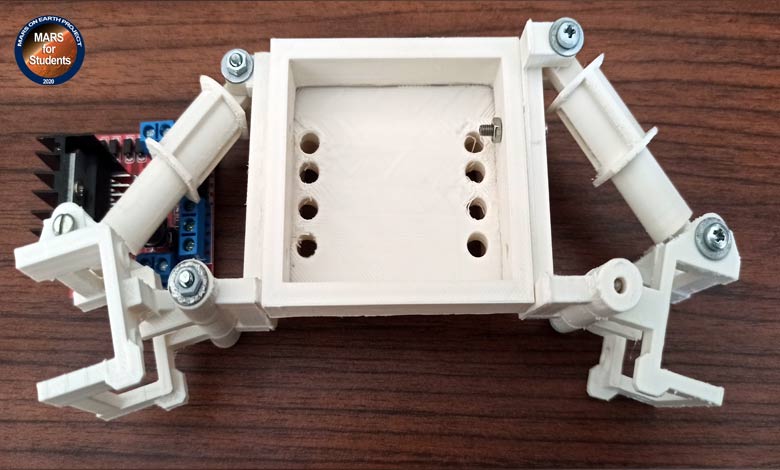
Rover 4 adet 3.7V 18650 model tip pil taşıyacak şekilde planlanmıştır. pil başına 2100mA güç üreten piller paralel bağlı 2 Adet 2S şeklinde (7.4V) olarak sisteme dahil edilecektir. Bu testler için yeterli zamanda güç üretebilecek kapasitededir. Ancak değiştirilebilen gövde yapısı ile gerektiğinde pil sayısı arttırabilmektedir.Piller; 18650 model tip pillere uygun çitli pil yataklarına yerleştirilmiş ve bir pil bloğu oluşturulmuştur. Nükleer güç ile çalışan son Mars rover tiplerinde olduğu gibi benzer şekilde roverin arka kısmına yerleştirilen bloğun ağırlığı 191 Gr'dır. İstenildiğinde alt kapak açılarak pil bloğu değişim için doğrudan dışarı alınabilmektedir.
Gücün efektif kullanımı için gerekmediği durumlarda gün ışığından aydınlatma sistemleri, gece ise güneş yön sistemi kapalı tutulmakta, görüntü aktarma ise zamana ve kullanıcı isteğine bağlıdır, diğer zamanlarda bekleme (Stand-by) konumundadır.
Model Rover Robot Kolu
İlk versiyona taşıma, kazıma, analiz vb. özellikler içermediğinden robot kol sistemi eklenmemiştir. Bu versiyonda daha çok komuta kontrol ve işlevsellik ön planda tutulmuştur. İkinci versiyonda çok eksenli ve tutuculu 3D baskı robotik kol kullanımı plan dahilindedir. Bunun şekillendirilmesinde ana taşıyıcıya, testlerden sonra karar verilmesi ve diğer faydalı yük yerleşimleri de etkili olacaktır.
Model Rover Haberleşme İstasyonu (NASA Deep Space Network- DSN Benzetim)
Ağ benzetiminde; "Mars on Earth Project" yazılımı ve modellenmiş fiziki Mars yerleşkesi olacaktır. Yerleşim alanında bulunan elektronik sistemler ve bunlara bağlı sensör verileri ile rover verileri telemetre ile Mars on Earth Project sunucusuna aktarılacak, kullanıcılar (istemci) bu verileri yazılım aracılığı ile ekranlarında görüntüleyeceklerdir.
STL Dosyaları
Mars rover prototipine ait tasarımı bitmiş ve 3D baskı için *.STL formatındaki dosyalara, harcanan filament uzunluğu, gramajı ve yaklaşık baskı süreleri bilgilerine GITHUB sayfamız üzerinde "Rover 3D Printed Files" başlığı altından ulaşabilirsiniz.



Hatırlatma: Değerli okuyucumuz; bu yazı sizin için emek verilerek hazırlandı. Beğendiyseniz bir dakikanızı ayırıp aşağıda yorum yapmanız, yeni yazıların hazırlanması konusunda yazarımızı motive edecektir. Teşekkürler.