Mars gezegenine doğrudan rover göndermeden çok önceleri bir çok gözlem uyduları ve çeşitli sondalar gönderilmiş, yüzey fotoğraflaması çeşitli spektrum tayflarında yapılmıştır. Uydular uzaktan algılama teknolojileri ile bu veriler incelenmiş ve haritalanmıştır. Bu çok değerli bilgiler rover görevlerinde iniş ve araştırma alanı yeri belirlemede ciddi bir alt yapı sağlamıştır.
Yapay Mars Alanı Harita
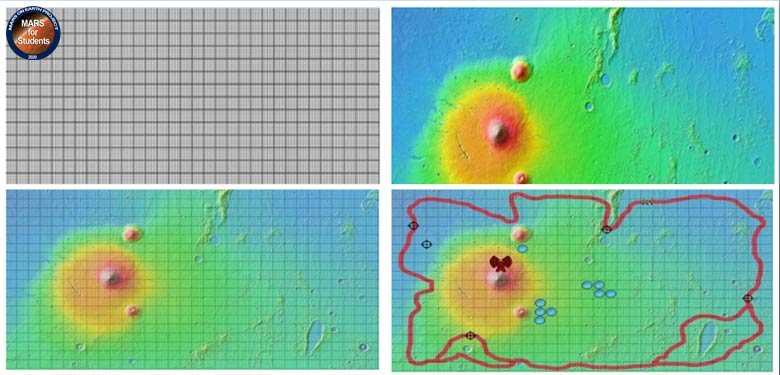
Aşağıdaki örnek renkli haritada gösterilen sarı alanlar 0 yüzey yüksekliğini, kırmızıdan itibaren geriye doğru olan renk skalası yükseklikleri, yeşilden maviye uzanan renk skalası ise yüzeyden itibaren (-eksi) derinlikleri göstermektedir. Buna göre en yüksek nokta beyaz, en derin nokta koyu mavidir.
Projede kullanıcılara yapay Mars alanının *.pdf formatında indirilebilir 6 sayfalık bir haritası sunulacaktır. Kullanıcılar bu haritayı yazıcıdan basıp birleştirerek yüzey ve rover parkuru hakkında bilgi sahibi olmaları kolaylaştırılmıştır.
Roverde canlı görsel sürüş olmadığından, harita ilerlemede ve bir sonraki ilerleme noktası seçmede yardımcıdır. Harita seyir yardımcıları, arazi eğim değerleri, görsel renk barı referans noktalarını ve yapay Mars yerleşkesinin üniteler için yeraltı güç dağıtım ağını içermektedir.
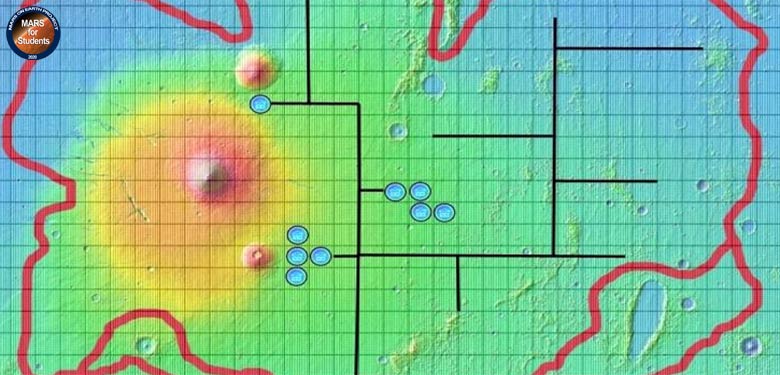
Sistemin gelecekte görece büyüyebileceği de göz önünde bulundurularak modüler bir yapıda olması ön planda tutulmuştur. Tıpkı bir şehrin alt yapısının planlanması gibi harita bazlı küçük iletim kanalları belirlenmiştir.
Bu kanallar üniteler arasındaki güç iletim ve haberleşme kablolarını fiziki modellenmiş yerleşim alanı altında gizleyeceklerdir. Kanalların meteor çukuru ve yükseltiler gibi sabit kalacak ve değişmeyecek arazi arızalarının yerleştirileceği bölgelerden geçirilmemesine özen gösterilmiştir.
Toprak altı gizlenecek olan bu kanallar ana arterlerin altına gelecek şekilde planlanmış ve 5-10 cm. derinlikte kazıldıktan sonra zemine ince kum dökülmesi planlanmıştır. Kablolar enerji üretim ve dağıtım tesisleri arasında kalın, haberleşmede ince seçilebilir.
Kablaj
Kabloların dış etkenlerden ve bazı data kablolarının da melanj etkisinden korunması için özellikle ünitelere dağılım ve ünitelere giriş çıkış noktalarında kablajın iyi yapılması, korozyona karşı korunması, kablo kanallarına konacak kablo demetlerinin gerekirse silikonlu akvaryum hava hortum veya ince serum hortumları ile korunması uzun süre bakım gerektirmeden dayanım için önem verilecektir.
Sistemde her ile ayrılabilecek yaklaşık 70 üniteye eş değerdir. Ancak tüm alanın ünitelerle (modellenmiş ve üretilmiş binalar, tesisler, araçlar vb) kaplanmayacağından hareketle, rover pistleri ve arazi modellemesi ile birlikte bu oran her il için yaklaşık 25-30 adet 1B üniteye karşılık gelecektir.
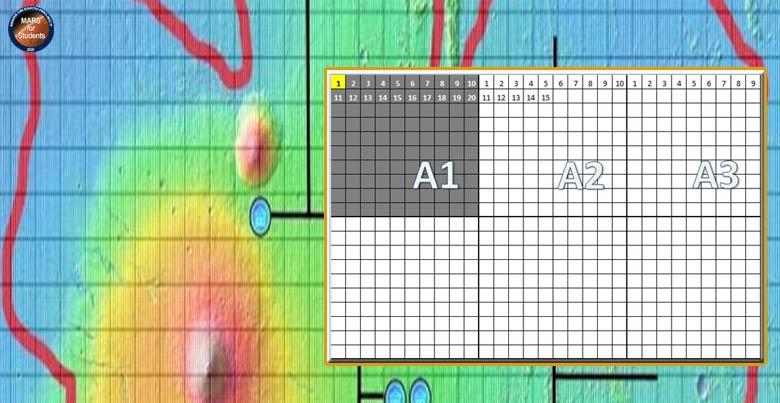
Harita kareleme yöntemi ile kendi içinde paftalara ve bölümlere ayrılmıştır. Bu sayede modellenerek üretilmiş olan ünitelerin de yerleri haritada belirtilmiştir. Harita yeni model ünite eklendikçe sürekli web üzerinde güncel tutulacaktır.
Alanın haritalanmasında önce 1'er metrekarelik ana bölümlere daha sonra kendi içinde karelenmesi daha uygun olacaktır. Bu durumda 1 metrekare içindeki kareler ayrıca kodlanmadan doğrudan soldan sağa başlayarak işaretlenecektir. (Örnek: A1-1) A1 ana paftasındaki 1 nolu alt kare.
Haritanın bir diğer avantajı da projeye ünite üretimi ile katılmak isteyenler kendi yaptıkları ünitenin nereye konmasını da güncel harita üzerinden seçebileceklerdir. Katılımcıların her çalışması kullanıcı arayüz listesinde kendi adıyla görünecektir.

Fiziki model Mars alanındaki ünitelerle iletişim kablosuz ağ (WI-FI) bağlantısı ile sağlanacaktır. Tüm üniteler iletişim için standart ESP8266 modül ve kod yapısını kullanacaklardır. bu modül yapısı ekonomik ve kolay bulunurluğu nedeniyle seçilmiştir. Üniteler tek yanlı olarak kullanıcı ara yüzüne gerek kalmadan sisteme veri gönderebilecekler.

Bir takım olarak sisteme üye olmuş kullanıcılar; kendi bulundukları yerde kendi lokal ünitelerini de sisteme bağlayabilmeleri için gerekli örnek ve standart telemetre kod yapısı web sayfasında yayınlanacaktır.
Sistemin işler hale gelmesi ile birlikte süreklilik arz eden telemetrik verilerin, komuta kontrol haberleşmesi aktarımı ve kullanıcı arayüzünün Dünya'daki mars Projesi (Mars on Earth Project) sunucu kaynaklarına ve veritabanına etkisi (CPU/RAM yükü) ve güvenlik açığı oluşturup oluşturmadığı takip edilerek, en iyi performans için gerekli ayarlamalar ve işlem gecikmesi modellenecektir.
Infrared Ağ (IRT)
Rover çalışmasında konum belirlemede Mars roverlerinde de olmadığı gibi GPS kullanılmayacaktır. Bunu yerine parkur Infrared alıcı ağı ile donatılacaktır.
IRT ve Konum Belirleme
Rover görev başlangıcındaki konumu kullanıcılar tarafından bilinmektedir. Gerçek roverlerde olduğu gibi görsel komuta kontrol yerine bir plan dahilinde kullanım sunulacaktır. Örnek;
- Konumunu görev çizelgesine kaydet,
- Haritayi incele,
- Sensör ağ verisini incele,
- Bir sonraki hareket bölgesi için planlama yap,
- Hareket komutu gönder (Komut rover'e 1 dakika sonra iletilecektir. Mars-Dünya gecikmesinin 20'de 1 oranında benzetimi),
- Veri kontrolünü yap (Rover bulunduğu yer bilgisini 1 dakika sonra cevaplayacaktır. 1 dizi komut ve cevap süresi yaklaşık 2 dakikadır)
- Yeni konumunu,
- Rover ana kamerasından gelen resimlerini (Referans değer),
- Motor sıcaklığını,
- Batarya sıcaklığını,
- Batarya seviyesini,
- Aracın 3 eksendeki eğim açılarını (Referans değer),
- Güneş ışık değerini (Referans değer),
- İşaretçi (beacon) verilerine göre "ileriden kestirme" konum belirleme tekniğini kullan (Referans değer),
- Görev bitimi görev raporunu yaz.

Yapay mars alanında rover parkuru boyunca her iki yana da yerleştirilmiş IRT alıcı ağ sensörleri bulunacaktır. Görevin zorlaştırılması için sensörler her bir komutta maksimum ilerleme penceresi içinde kalacak şekilde yerleştirilecektir. Rover hareket halinde iken her iki yanda da bulunan ve farklı işaret gönderen Infrared LED'ler aracılığı ile aracın kaba konumu bilinecek, diğer referans bilgilerle de doğruya yakın konum elde edilecektir.
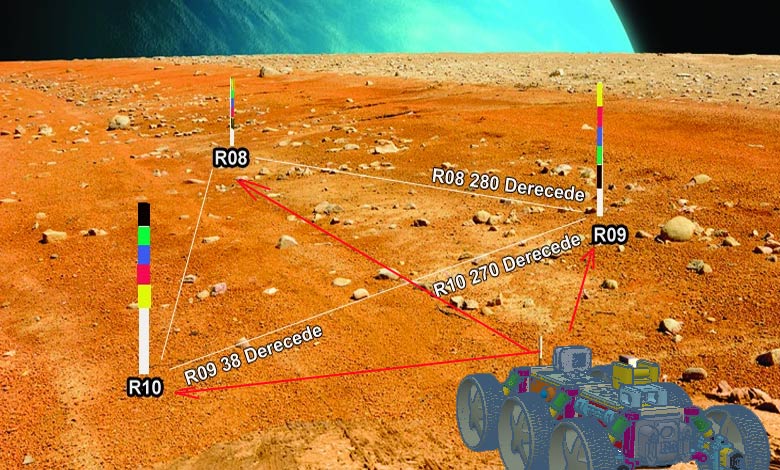
Rover sürücüsüne konum belirleme kolaylığı açısından bir diğer seçenek ise; 20 cm. uzunluğunda direklerin, üstte 5 cm.lik kısmı 5 ayrı renk skalasına sahiptir ve her bir direğin renk sıralaması farklı işaretlerdir. Bu renklerin rover üzerindeki kameradan okunması ile konum harita üzerinden bulunabilir. 5 renk bandı kullanımda yol boyunca 120 referans çubuk kullanılabilir. Bu sistem haritacılıkta nirengi noktaları, "ileriden kestirme" özelliği olarak da tanımlanır.
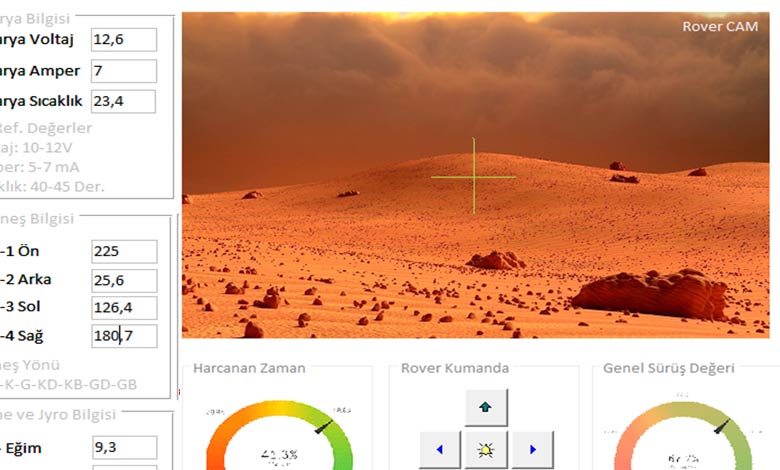
ESP32CAM modül kamerasının görüş açısı 65 derecedir. Rover kullanıcı arayüzüne aktarılacak olan ve rover ana kamerası tarafından çekilen görüntü değeri orta "+" kıla göre; sağ ve sol 32,5 derecelik alanlar kendi içinde derecelendirilebilir ve diğer referans destekleri ile birlikte hesaplamalar yapılabilir. Bu hesaplamalar bilgi olarak harita dokümanına eklenecektir.
[box type="info" align="" class="" width=""]İleriden Kestirme; harita üzerinde yeri tam olarak bilinmeyen bir noktanın, arazide yeri bilinen (kamerada görünen) ve haritaya işaretlenmiş olan iki ve daha fazla nokta yardımı ile konum belirlemek olarak tanımlanabilir.[/box]
Yapay Zeka (AI) Desteği
ESP32CAM Kameranın görüntü işleme (Yapay Zeka-AI) özelliğinin; görüntü işleme (image processing) ile harmanlanıp (yüzeyle aynı tona yakın olan turuncu renk referans çubuklarda kullanılmadan) kamerada algılanan renk skala koduna göre de konum belirleme algoritmaları üzerinde test yapılacaktır.



Hatırlatma: Değerli okuyucumuz; bu yazı sizin için emek verilerek hazırlandı. Beğendiyseniz bir dakikanızı ayırıp aşağıda yorum yapmanız, yeni yazıların hazırlanması konusunda yazarımızı motive edecektir. Teşekkürler.